



Servo drive de bus EtherCAT con gran compatibilidad de dispositivos. Ofrece opciones de alimentación de 220V o 380V según las necesidades del usuario. Diseño de doble placa con circuitos separados para operación estable. Un amplio rango de potencia satisface escenarios de aplicación diversos y complejos.
| Serie Principal | Descripción de la Serie | Serie | Descripción de la Serie | Modelo | Voltaje de Alimentación | Corriente Máx |
| VD3E | EthrtCAT通讯协议Servo Drive de tipo bus con un amplio rango de potencia, compatible con el protocolo de comunicación EtherCAT. | VD3E(Tipo A) | drive de bus EtherCAT con gran compatibilidad de dispositivos. Cuenta con una estructura de diseño de doble placa con circuitos de alta y baja tensión separados para una operación más estable. Múltiples modos de control satisfacen escenarios de aplicación complejos y diversos de los usuarios. | VD3E-010SA1G | 220V | 10A |
| VD3E-014SA1G | 220V | 14A | ||||
| Serie | Descripción de la Serie | Modelo | Voltaje de Alimentación | Corriente Máx | ||
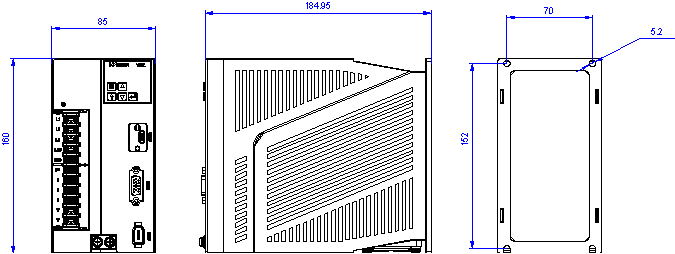
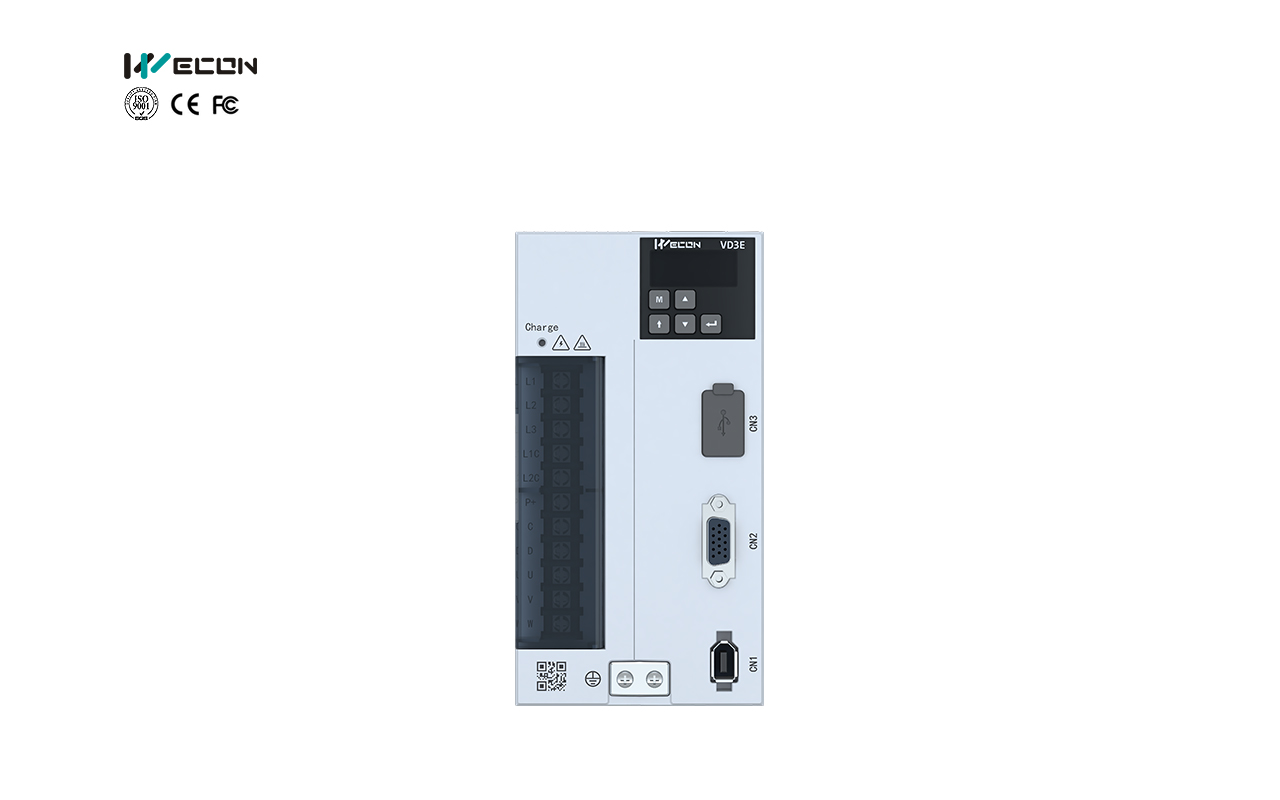
| VD3E(Tipo B) | Servo drive de bus EtherCAT con gran compatibilidad de dispositivos. Ofrece opciones de alimentación de 220V o 380V según las necesidades del usuario. Diseño de doble placa con circuitos separados para operación estable. Un amplio rango de potencia satisface escenarios de aplicación diversos y complejos. | VD3E-016SA1G | 220V | 16A | ||
| VD3E-019SA1G | 220V | 19A | ||||
| VD3E-021SA1G | 220V | 21A | ||||
| VD3E-025SA1G | 220V | 25A | ||||
| VD3E-030SA1G | 220V | 30A | ||||
| VD3E-016TA1G | 380V | 16A | ||||
| VD3E-019TA1G | 380V | 19A | ||||
| VD3E-021TA1G | 380V | 21A | ||||
| Serie | Descripción de la Serie | Modelo | Voltaje de Alimentación | Corriente Máx | ||
| VD3E(Tipo C) | Servo drive de bus EtherCAT con gran compatibilidad de dispositivos. Su diseño de doble placa separa circuitos de alta y baja tensión para mayor estabilidad. Alimentado por 380V, ofrece alta capacidad de carga para aplicaciones exigentes. | VD3E-030TA1G | 380V | 30A | ||
| VD3E-040TA1G | 380V | 40A | ||||
| VD3E-050TA1G | 380V | 50A |
| Modelo | VD3E(Tipo B) | ||
| Especificaciones básicas | Alimentación | Fuente de alimentación de 220 V/ 380V | |
| Modo de control | Variador de corriente sinusoidal controlado por IGBT PWM | ||
| Realimentación de Encoder | Encoder absoluto de 17/23 bits | ||
| Entrada de señal de control | 6 entradas DI, con funciones configurables mediante códigos de función | ||
| Salida de señal de control | 3 salidas DO, con funciones configurables mediante códigos de función | ||
| Función de comunicación | Comunicación con el computador host | Interfaz USB. Permite la configuración de parámetros de códigos de función, monitorización de estado, visualización de formas de onda y autoajuste de parámetros a través del computador host. | |
| Resistencia de frenado | Resistencia de frenado integrada, admite resistencia de frenado externa | ||
| Funciones generales | Ajuste automático de parámetros | Admite identificación automática de la inercia de la carga y ajuste automático del grado de rigidez mediante el computador host | |
| Visualización de formas de onda | Permite la visualización en tiempo real de las formas de onda de velocidad, par y desviación de posición a través del computador host | ||
| Almacenamiento de formas de onda | Frecuencia de muestreo de formas de onda: 1 kHz, almacena hasta 10 s de datos sin procesar | ||
| Importación y exportación de parámetros | Admite importación y exportación de parámetros por lotes; admite descarga SDO | ||
| Supresión de vibraciones | Se pueden configurar parámetros de supresión de vibraciones para reducir la vibración mecánica | ||
| Función de protección | Sobretensión, subtensión, sobrecorriente, sobrevelocidad, sobrecarga, sobrecalentamiento, fallo del encoder, desviación excesiva de posición, límite de par, límite de velocidad, etc. | ||
| Freno | Admite control de salida del freno | ||
| Entrada DI de control general | Borrado de fallos y advertencias (A-CLR), deshabilitación de avance (POT), deshabilitación de retroceso (NOT), parada de emergencia (E-STOP) | ||
| Salida DO de control general | Servo listo (RDY), señal de fallo (ALM), señal de advertencia (WARN), detección de rotación (TGON), señal de velocidad cero (ZSP), límite de par (T-LIMIT), límite de velocidad (V-LIMIT), salida de estado de servo activado (SRV-ST), salida de servofreno (BRK-OFF), comunicación VDO | ||
| Relacionado con EtherCAT | Relacionado con EtherCAT | Protocolo de comunicación | Protocolo EtherCAT |
| Servicios soportados | CoE(PDO,SDO) | ||
| Método de sincronización | Reloj distribuido de CC | ||
| Capa física | 100BASE-TX | ||
| Velocidad de transmisión | 100 Mbit/s(100Base-TX) | ||
| Modo dúplex | Dúplex completo | ||
| Topología | Anillo o lineal | ||
| Medio de transmisión | Cable blindado de categoría 5e o superior | ||
| Distancia de transmisión | Menos de 100 M entre dos nodos (en buenas condiciones y con cables de alta calidad) | ||
| Longitud de trama | 44 a 1498 bytes | ||
| Sobrecarga de datos | Tamaño máximo de trama Ethernet individual: 1486 bytes | ||
| Fluctuación de sincronización | <1μs | ||
| Reloj distribuido | 64 bits | ||
| Capacidad de EEPROM | Los datos de inicialización de 8k bits se escriben a través del maestro EtherCAT | ||
| Modo de control y rendimiento | Modo de control | CSP、HM、CSV、CST、PT | |
| Periodo de sincronización | 125μs | ||