Servo drive universal de tipo pulso, alimentado por 220V. Múltiples modos de control para satisfacer escenarios de aplicación complejos y diversos de los usuarios. Algunos modelos admiten salida DO de alta velocidad y función PID externa.
| Serie Principal | Serie | Descripción de la Serie | Modelo | Voltaje de Alimentación | Corriente Máx | |
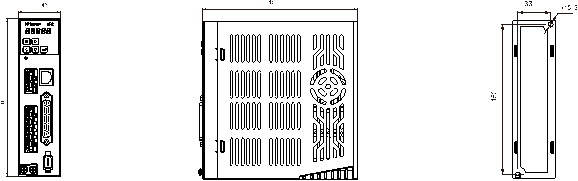
| VD2 | Servo drive universal de tipo pulso, que cuenta con abundantes señales de retroalimentación y un amplio rango de potencia. | VD2(Tipo A) | Servo drive universal de tipo pulso, alimentado por 220V. Múltiples modos de control para satisfacer escenarios de aplicación complejos y diversos de los usuarios. Algunos modelos admiten salida DO de alta velocidad y función PID externa. | VD2-010SA1G/H/R | 220V | 10A |
| VD2-014SA1G/H/R | 220V | 14A | ||||
| Serie | Descripción de la Serie | Modelo | Voltaje de Alimentación | Corriente Máx | ||
| VD2(Tipo B) | Servo drive universal de tipo pulso con un amplio rango de potencia. Múltiples modos de control para satisfacer escenarios de aplicación complejos y diversos de los usuarios. Algunos modelos admiten salida DO de alta velocidad y función PID externa. | VD2-016SA1G/H/R | 220V | 16A | ||
| VD2-019SA1G/H/R | 220V | 19A | ||||
| VD2-021SA1G/H/R | 220V | 21A | ||||
| VD2-025SA1G | 220V | 25A | ||||
| VD2-030SA1G | 220V | 30A | ||||
| VD2-016TA1G | 380V | 16A | ||||
| VD2-019TA1G | 380V | 19A | ||||
| VD2-021TA1G | 380V | 21A | ||||
| Serie | Descripción de la Serie | Modelo | Voltaje de Alimentación | Corriente Máx | ||
| VD2(Tipo C) | ServoDrive universal de tipo pulso, alimentado por 380V, diseñado para cargas pesadas en equipos grandes. Múltiples modos de control para satisfacer escenarios de aplicación complejos y diversos de los usuarios. Algunos modelos admiten salida DO de alta velocidad y función PID externa. | VD2-030TA1G | 380V | 30A | ||
| VD2-040TA1G | 380V | 40A | ||||
| VD2-050TA1G | 380V | 50A |
| Modelo/Especificaciones | VD2(Tipo A) | ||
| Especificaciones básicas | Alimentación | Fuente de alimentación de 220 V | |
| Modo de control | Variador de corriente sinusoidal controlado por IGBT PWM | ||
| Realimentación de Encoder | Encoder incremental de 2500 líneas; encoders absolutos de 17 y 23 bits | ||
| Entrada de señal de control | 8 entradas DI | ||
| Salida de señal de control | 4 salidas DO | ||
| Entrada de señal analógica | Entrada AI de 2 canales; rango (-10 V a +10 V) | ||
| Entrada de señal de pulsos | Entrada de colector abierto o diferencial | ||
| Salida de retroalimentación de pulsos | Salida diferencial A; Salida diferencial B; Salida diferencial Z | ||
| Embrague interno | Admite comando de velocidad interno de 8 segmentos; admite comando de posición interno de múltiples segmentos | ||
| Función de comunicación | Admite simultáneamente la comunicación Modbus y la comunicación con el computador host (upper computer). A través del enlace con el computador host, los usuarios pueden realizar la configuración de parámetros de códigos de función, monitorización de estado, visualización de waveforms, auto-sintonía de parámetros, etc., mediante el software en la PC. | ||
| Resistencia de frenado | Resistencia de frenado integrada; admite resistencias de frenado externas. | ||
| Configuración de funciones | Funciones generales | Ajuste automático de parámetros | Identificación automática de la inercia de la carga y autoajuste de los parámetros de rigidez |
| Visualización de formas de onda | Monitorización de la desviación de velocidad, par y posición en tiempo real | ||
| Almacenamiento de formas de onda | Almacena hasta 10 segundos de datos de forma de onda sin procesar | ||
| Importación y exportación de parámetros | Admite la importación y exportación de parámetros por lotes; admite la configuración automática de los parámetros del servo por PLC (compatible con algunos modelos). | ||
| Supresión de vibraciones | Se pueden configurar parámetros de supresión de vibraciones para suprimir la vibración mecánica. | ||
| Función de protección | Sobretensión, subtensión, sobrecorriente, sobrevelocidad, sobrecarga, sobrecalentamiento, fallo del encoder, desviación excesiva de la posición, límite de par, límite de velocidad, etc. | ||
| Freno | Admite control de la salida del freno. | ||
| Entrada DI de control general | (INPOS1、INPOS2、INPOS3、INPOS4、ENINPOS) Habilitación de servo (SON), borrado de fallos y advertencias (A-CLR), deshabilitación de avance (POT) Deshabilitación de retroceso (NOT), inversión de comando (C-SIGN), parada de emergencia (E-STOP) Conmutación de ganancia (GAIN-SEL), selección de comando de velocidad interna multietapa (INSPD1, INSPD2, INSPD3) Selección y habilitación de comando de posición interna multietapa (INPOS1, INPOS2, INPOS3, INPOS4, ENINPOS) | ||
| Salida DO de control general | Servo listo (RDY), señal de fallo (ALM), señal de advertencia (WARN), detección de rotación (TGON) Señal de velocidad cero (ZSP), límite de par (T-LIMIT), límite de velocidad (V-LIMIT) Salida de estado de servo activado (SRV-ST), salida de servofreno (BRK-OFF), retroalimentación de salida de pulsos ABZ | ||
| Modo de posición | Frecuencia de pulsos | Hasta 500KHz | |
| Forma de pulsos | CW/CCW; Dirección + pulso; CW/CCW; Codificación de cuadratura de fase AB | ||
| Filtrado de pulsos | Filtro paso bajo de primer orden o filtro de suavizado | ||
| Salida de pulsos | Salidas A, B y Z del encoder de cuadratura diferencial; conteo de pulsos por revolución configurable o formato numerador/denominador | ||
| Modo de velocidad | Entrada de comandos | Entrada analógica de -10 V a +10 V; comando de velocidad interno (8 niveles) | |
| Fijación de velocidad cero | La función de fijación de velocidad cero permite fijar la velocidad del motor a cero | ||
| Límite de par | Límite de par configurable | ||
| Modo de par | Entrada de comandos | Entrada analógica de -10 V a +10 V; control de par interno | |
| Alcance de par | Umbral de par y salida DO configurables de forma flexible | ||
| Límite de velocidad | Límite de velocidad configurable de forma flexible | ||